A kézi munkát helyettesítő képességének köszönhetően a robotok széles körben alkalmazhatók. Az iparban jól ismert csúszógyűrű-gyártóként a JINPAT számtalan forgó vezetőképes megoldást kínált különböző funkciójú robotok számára. A JINPAT esettől kezdve ezeknek a csúszógyűrűs robotoknak a túlnyomó többsége a hagyományos feldolgozóipari robotokra vonatkozik. Az idő fejlődésével azonban a robotokat fokozatosan más területekre is felszabadították, és más feltörekvő területeken alkalmazták. Ezen új alkalmazások közül a sebészeti robotok a legjellemzőbb képviselők.
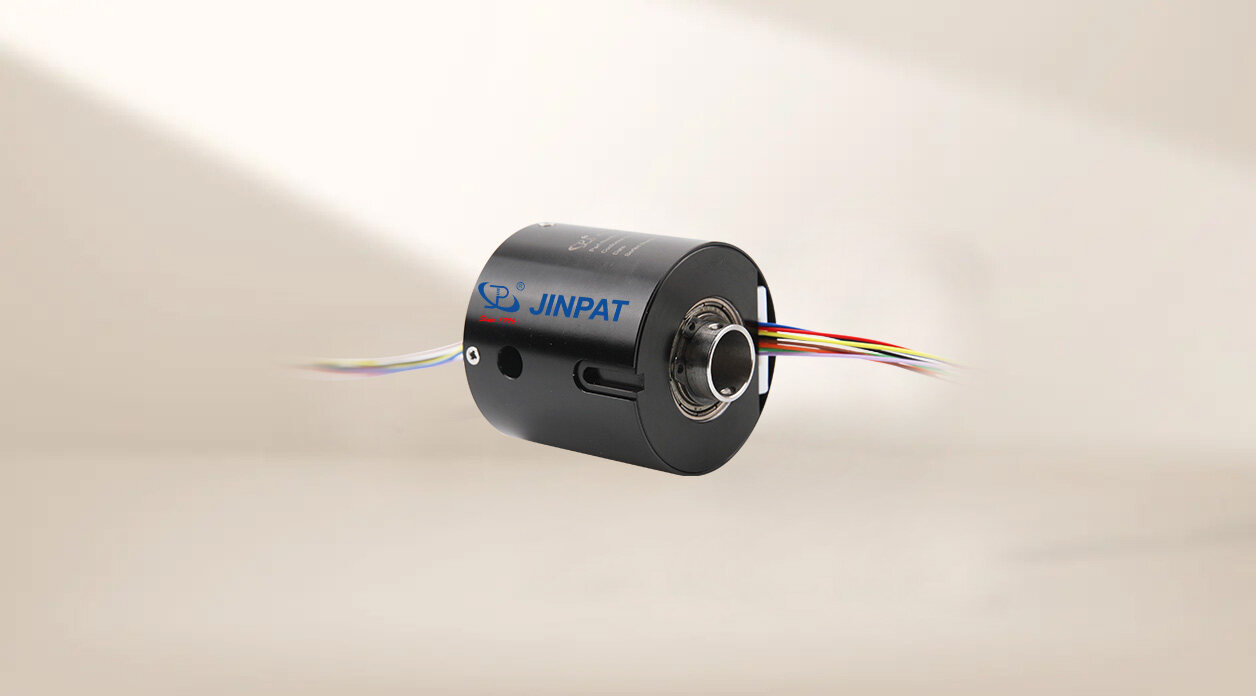
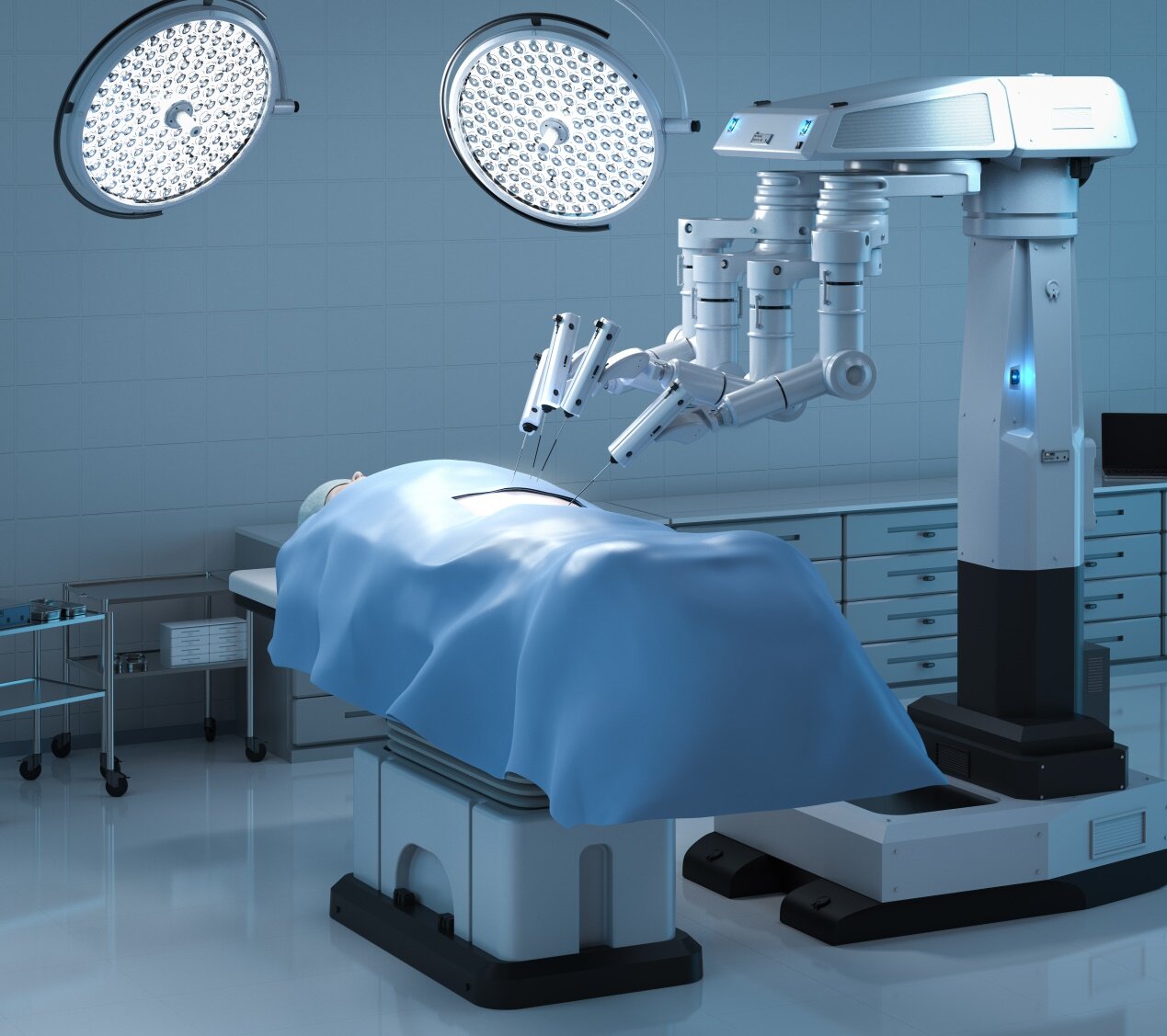
A feldolgozóiparhoz képest, ahol a robotoknak ismételten nagy intenzitású munkát kell végezniük a használat során, a sebészeti robotoknak csak az orvosokat kell segíteniük a nagy pontosságú műtétek rövid időn belüli elvégzésében. Egyes robotoknak önállóan kell elvégezniük néhány kevésbé bonyolult betegkezelési vagy speciális betegségfelderítési feladatot, amelyek nem túl intenzívek. Jelenleg olyan orvosi robotok, amelyek csúszógyűrűk felszerelését igénylik, és már használatba vették, beleértve a fejlett kardiovaszkuláris és agyi sebészeti kezelő robotokat. Ezek a robotok integrálják a nagy felbontású videót és a nagy működési pontosságot, és gyorsan segíthetnek az orvosoknak a betegségek diagnosztizálásában és a műtétekben. A csúszógyűrűk olyan kombinált terméket használnak, amely 2K vagy több SDI nagyfelbontású videojelet integrál.
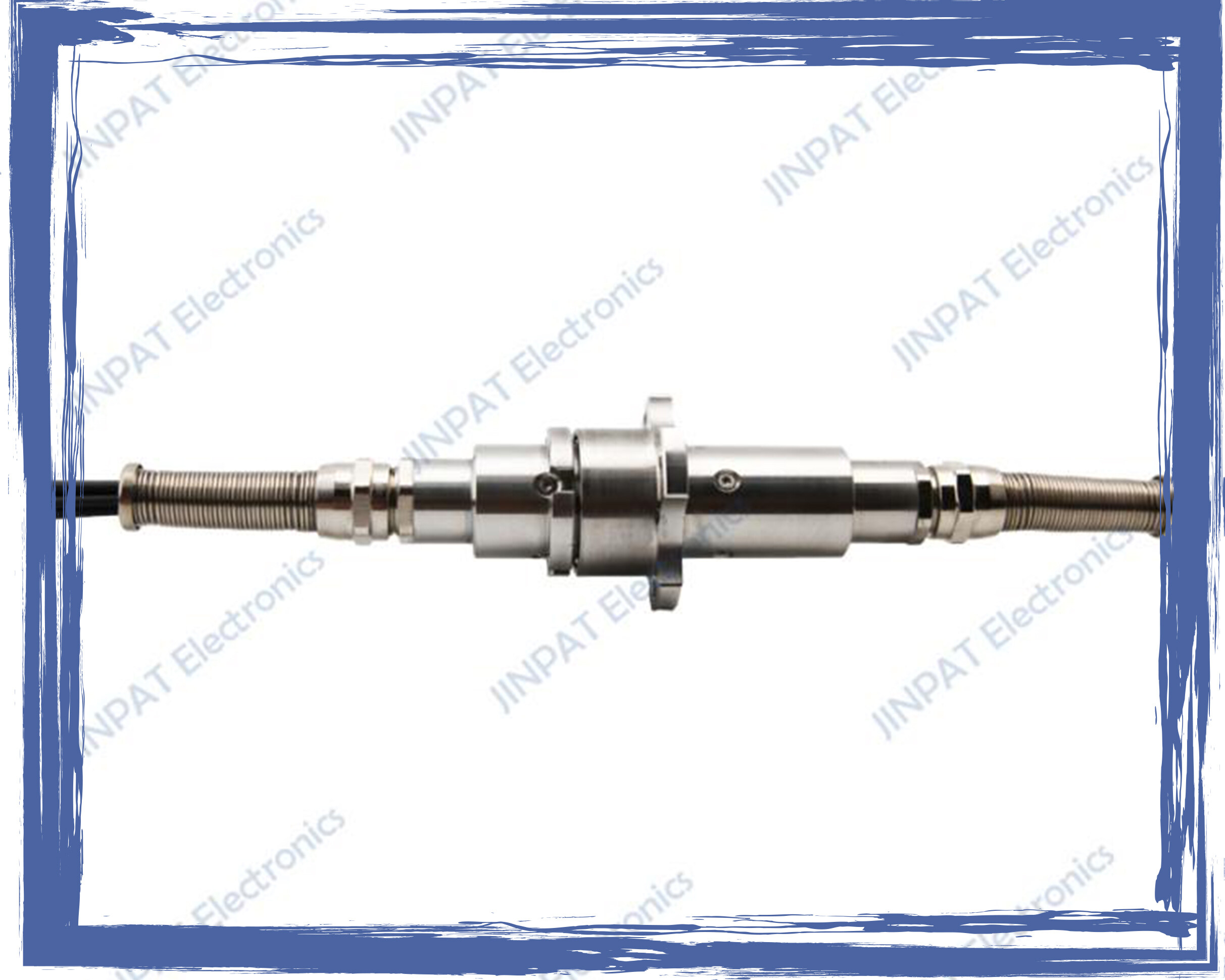
Az iparban a csúszógyűrűk elismert gyártójaként a JINPAT egyike a legkorábbi gyártóknak, akik kapcsolatba léptek és kifejlesztettek csúszógyűrűket orvosi robotokhoz. Jelenleg az JINPAT több tucat speciális csúszógyűrűt fejlesztett ki intelligens robotok számára az orvosi iparban. Ezeket a csúszógyűrűket általában ortopédiai kezelőrobotokban, endoszkópos kezelőrobotokban, valamint kardiovaszkuláris és cerebrovaszkuláris robotokban használják, beleértve a hagyományos elektromos jelkombinációs csúszógyűrűket és az optoelektronikus integrált csúszógyűrűket.
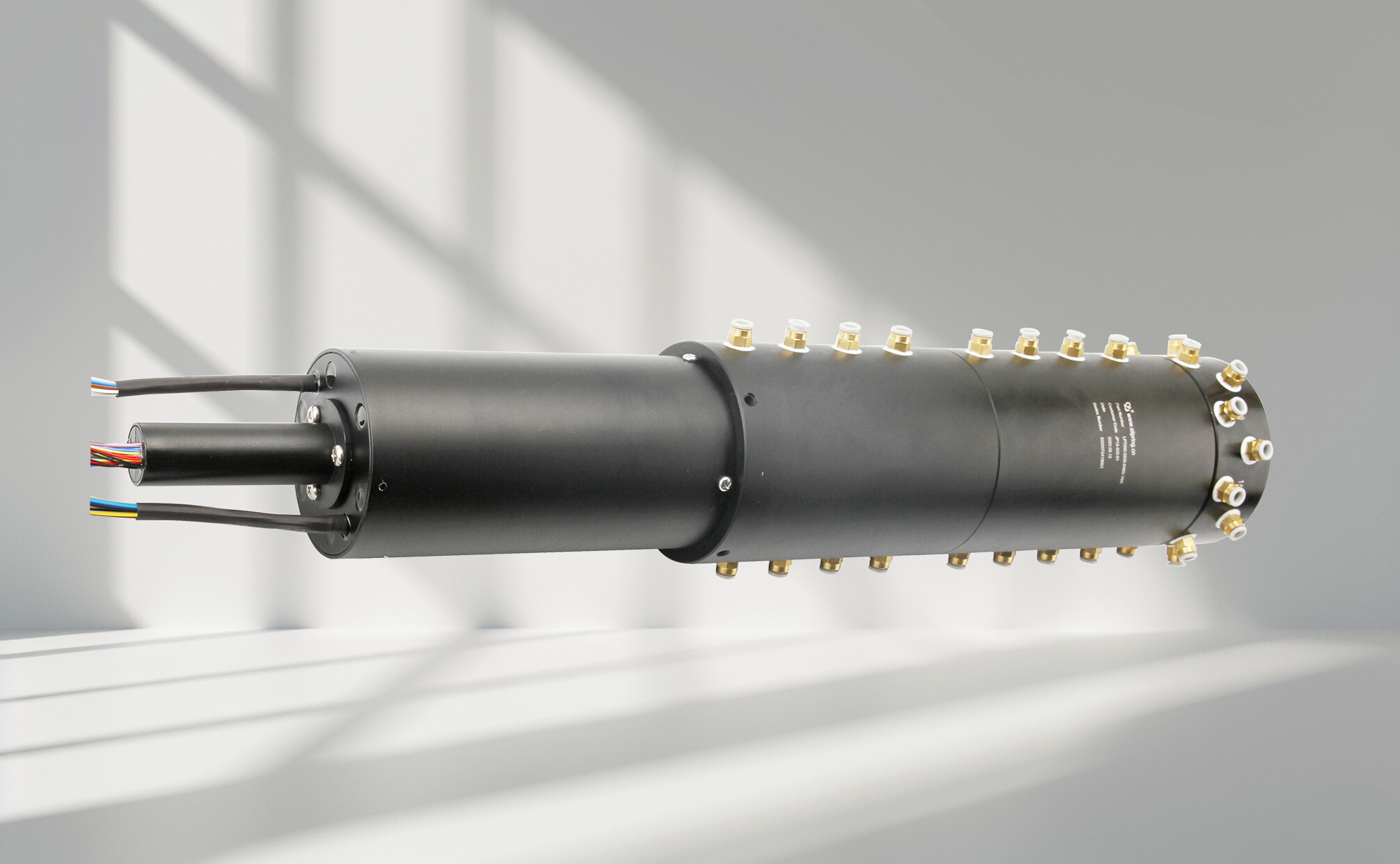
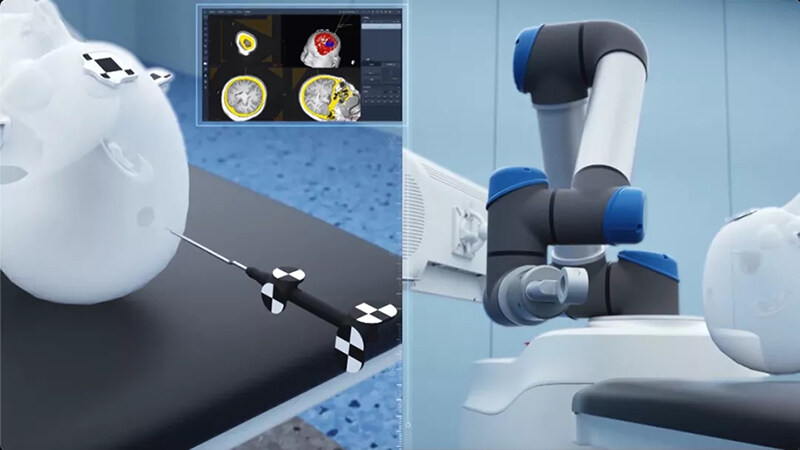
Az orvosi iparban a robotika területén történő növekvő befektetések révén számos új, eltérő funkciójú robotot fejlesztettek ki. Például egy más cégek által nemrégiben kifejlesztett daganatkezelő robot különféle eszközöket, például daganatkezelő berendezéseket és sportműtőasztalokat integrál. Ezért több csúszógyűrűt kell használni az egész rendszerben. A sugárterápiás modulhoz nagy teljesítményű impulzusjel- és teljesítménybeépített csúszógyűrűre, vagy nagyfrekvenciás és teljesítményű integrált csúszógyűrűre van szükség. Ha a műtőasztal végtelen forgási funkcióval rendelkezik, akkor szükség van egy csúszógyűrűre, amely több életjel-figyelő jelet integrál, hogy a páciens kezelési folyamata során a különböző tünetek valós idejű monitorozása elérhető legyen.